Es gibt keine Website-Inhalte zu Ihrer Suchanfrage.
Website-Inhalte
Sie haben sich erfolgreich abgemeldet.
Not registered yet?
Es gibt keine Website-Inhalte zu Ihrer Suchanfrage.
Website-Inhalte
Es gibt keine Produkte zu Ihrer Suchanfrage.
Produkte
Eine aufregende Technologie
Bessere Präzision und Genauigkeit, kürzere Betriebszeit, persönliches Wohlbefinden und kürzere Lernkurve.

Der Inhalt dieser Webseite ist nur für Personen vorgesehen, die im Gesundheitswesen tätig sind (Health Care Professionals = HCP). Mit Klick auf „Bestätigen“ erklären Sie, dass Sie eine Fachperson im Gesundheitswesen sind. Ist dies nicht der Fall, klicken Sie auf "Ablehnen" und besuchen Sie unsere öffentlich zugänglichen Seiten.
Bestätigen Ja, ich bin ein Healthcare-Professional. Abbruch Nein, ich bin kein Healthcare-Professional.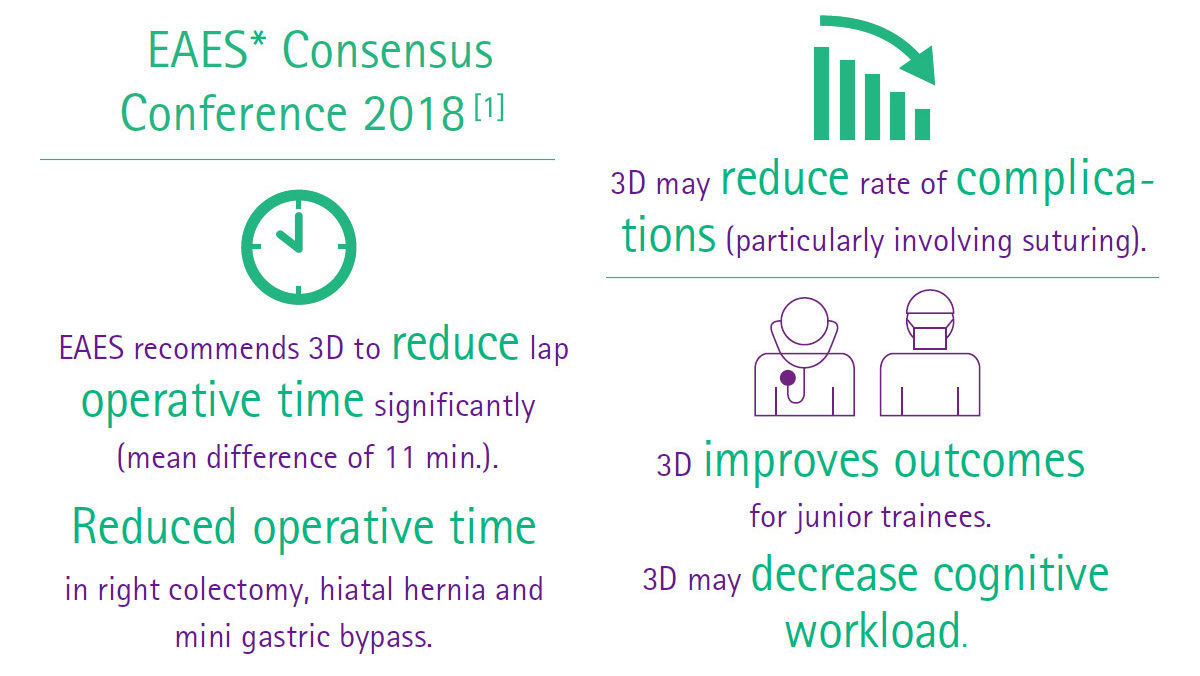
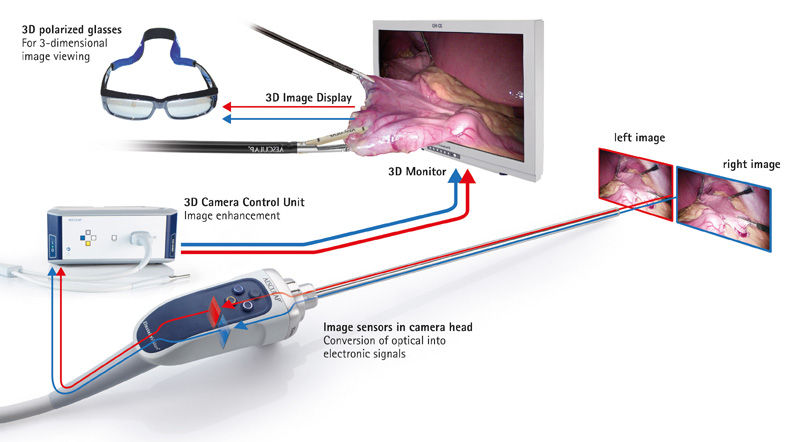

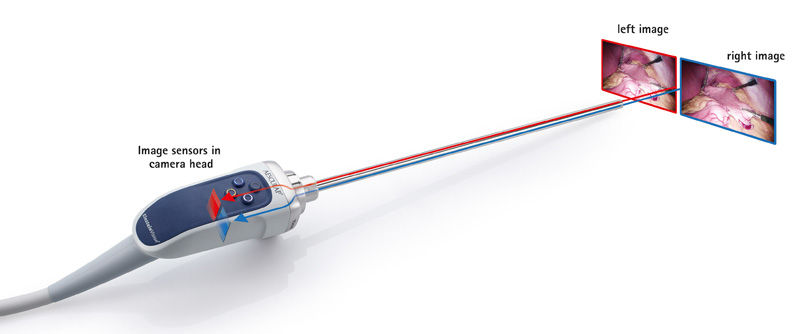
Kleinere Sensoren haben eine verkleinerte Pixelgröße, was in der Regel zu einem höheren Pegel an störendem Bildrauschen führt. Daher ist es von Vorteil, größere Sensoren in der Kamera zu haben.

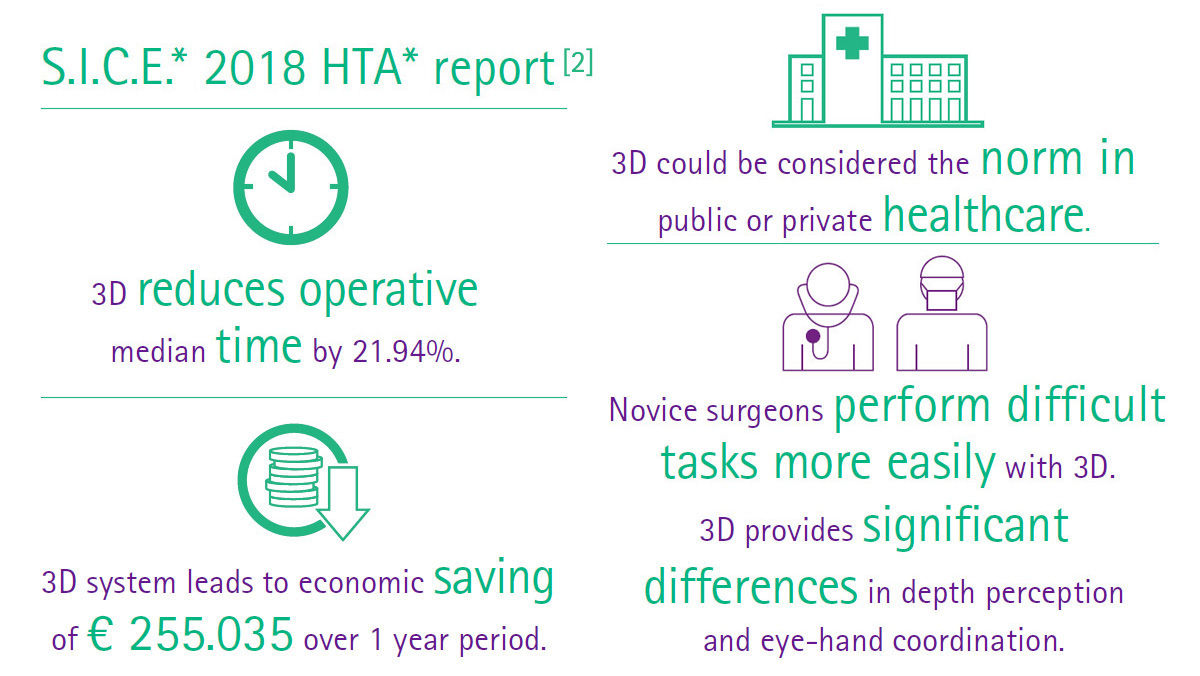
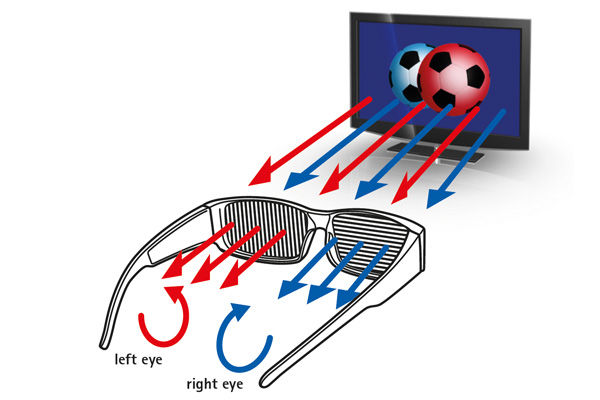
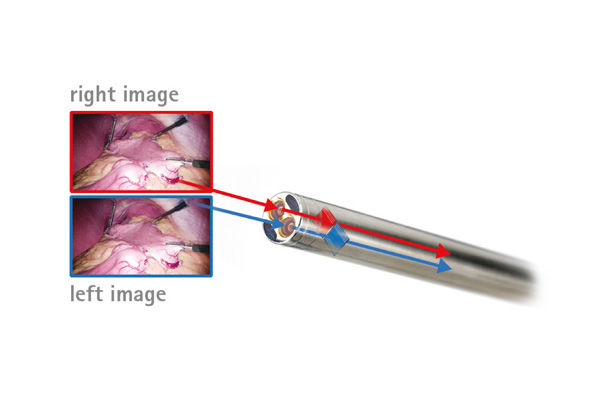
Die Laparoskopie hat die Chirurgie im Vergleich zu offenen Eingriffen revolutioniert, insbesondere in Bezug auf die Reduzierung von Komplikationen. Die Laparoskopie kann durch innovative Technologie weiter verbessert werden. Ein solcher Ansatz ist die 3D-Laparoskopie.
Mehr erfahrenWenn neue medizinische oder technische Innovationen ihren Weg in die allgemeine Praxis finden, gibt es anfangs oft keinen klaren Konsens über deren Vorteile. Der Vergleich zwischen 3D- und 2D-Laparoskopie ergab jedoch eine klare Entscheidung für die 3D-Technologie.
Mehr erfahren